海洋鳥類漂泊信天翁可以連續飛行幾十天而不休息,飛行里程近15000公里;陸地上奔跑最快的動物之一獵豹,捕獵時最快速度能達到29m/s(104.4km/h),接近汽車在高速公路上飛速行駛的速度……自然界中動物特異的運動能力很大程度上得益于他們卓越的肌肉性能。受肌肉出色性能的吸引,人們對研制能夠模仿肌肉運動如伸縮、旋轉、彎曲等的人工肌肉越來越感興趣。新興的基于介電彈性體、刺激-響應聚合物、形狀記憶合金(SMA)以及碳基復合物等材料的人工肌肉雖然相比于傳統電氣、液壓、氣壓驅動器具有體積輕小、結構緊湊、價格低廉等優勢,但其需要高驅動電壓、應變小、響應慢等缺陷嚴重限制了它們的應用。
近日,中國科學技術大學工程科學學院張世武教授、金虎副研究員聯合英國伯明翰大學唐詩楊博士、澳大利亞伍倫貢大學李衛華教授、蘇州大學李相鵬教授以及美國北卡羅來納州立大學Michael Dickey教授組成的研究組提出了一種基于電化學方法改變液態金屬表面張力的液態金屬人工肌肉(LMAM)來模仿肌肉的收縮及舒張功能。LMAM能在不同pH溶液(0-14)中工作,最大伸展速度達到15mm/s,最大應變達到87%,另外,這種人工肌肉所需的驅動電壓極小,舒張時驅動電壓僅需0.5V,收縮時僅需4V。該項工作有望為柔性驅動器在微機電系統、生物醫學等領域的應用提供全新思路。相關成果以“A Liquid Metal Artificial Muscle”為題發表在 Advanced Materials上。
近年來,鎵基液態金屬由于其卓越的物化特性成為一大研究熱點。鎵基液態金屬兼具液體和固體的一些特性,包括高電導/熱導率,良好的柔性,毒性極低且不易揮發。此外,鎵基液態金屬極易被氧化形成表面氧化膜,未被氧化時,液態金屬具有目前已知液體中最大的表面張力(>600mN/m),氧化后,液態金屬的表面張力可降至接近0。聯合研究組利用電化學方法快速、可逆地實現這兩種狀態的切換(圖1a - c),同時,研究組通過機構設計,構造液橋,將液態金屬液滴狀態切換過程中的形態變化轉化為驅動行程及驅動力。如圖1d所示,液滴上下兩端布置銅電極,其不僅為液滴提供氧化/還原電壓,銅和液態金屬優異的潤濕性還使得液滴能被錨定在銅片上。液態金屬液滴在上下銅電極之間形成液橋,電極提供氧化電壓時(+4V),液滴從近球狀變成扁平泥狀,液橋對上基底的作用力向下,液橋高度降低,人工肌肉“收縮”;電極提供還原電壓時(-0.5V),液滴從扁平泥狀恢復成近球狀,液橋對上基底的作用力向上,液橋恢復初始高度,人工肌肉“舒張”。在0.25Hz電壓(4V到-0.5V)驅動下,人工肌肉能提供約20mN的拉力,40mN的推力,超過1mm的驅動行程(圖1i)。
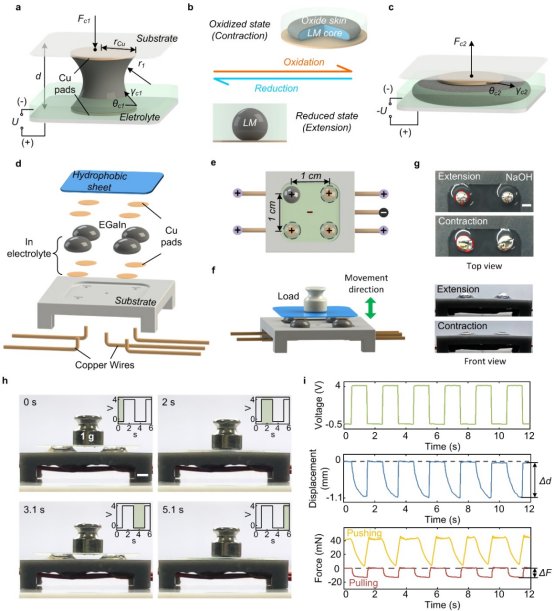
圖1 液態金屬人工肌肉的驅動
研究人員隨后通過對驅動參數優化、驅動單元的串并聯提升人工肌肉的性能。為了驗證LMAM良好的驅動性能和應用潛力,研究展示了LMAM在編碼顯示、貨物運載、可重構光學器件中的應用。研究人員還基于LMAM驅動開發了一種自主游動(untethered)的單尾鰭仿生機器魚(圖2)。尾鰭一端的兩側對稱布置有兩個LMAM驅動單元,兩個單元的異步收縮-舒張驅動尾鰭連續擺動(圖2b),從而驅動機器魚向前游動。機器魚僅由一節3.7V(80mAh)鋰電池供電,驅動信號由內載MCU調制,在2Hz電壓信號驅動下,機器魚游動速度能達到10cm/min,續航時間達40min。
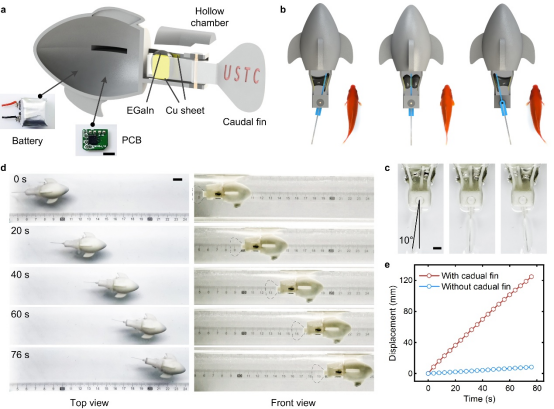
圖2 基于液態金屬人工肌肉的仿生機器魚
該研究證實了基于液態金屬液滴的柔性驅動器在低輸入電壓下具備卓越的驅動性能,為未來開發基于低功率驅動器機器人系統鋪平了道路。工程科學學院博士研究生舒健、葛杜安、王二龍為論文共同第一作者,工程科學學院張世武教授、金虎副研究員,以及英國伯明翰大學唐詩楊博士為論文共同通訊作者。該研究工作得到了國家自然科學基金等項目資助與支持。
近日,聯合研究組還提出了一種通用的光誘導液態金屬液滴驅動方案:使用激光束選擇性地激活電解液中的光電晶體管,從而利用馬拉格尼力(Marangoni force)實現對液態金屬液滴的電驅控制(圖3)。該方案無需復雜和龐大的系統,簡單利用光即可誘導多個液態金屬液滴的并發運動、分裂和合并,研究人員也展示了其在光控繼電器等方面的應用。這種用于操縱LM液滴的光誘導控制方法為在MEMS、現場可編程機器人和基于液滴的液體協作機器人領域的未來創新研究提供了新的方向和技術途徑。相關成果以標題為“Light-controlled versatile manipulation of liquid metal droplets: a gateway to future liquid robots” 發表在Materials Horizons上,并被選為封底文章。
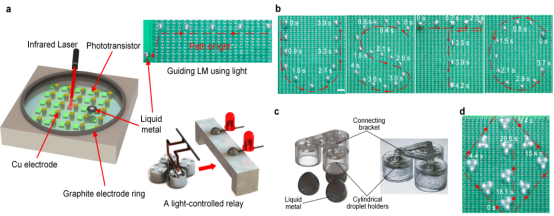
圖3 光誘導液態金屬液滴驅動 (a)光誘導液態金屬驅動裝置;(b)光誘導液態金屬液滴沿特定圖案運動;(c)和(d)光誘導液態金屬驅動小車
此外,聯合研究組還基于液態金屬的電致驅動成功研制了一種無需任何常規電磁器件的液態金屬電機(圖4a),該電機利用電場在液態金屬液滴兩側形成表面張力差,驅動電機轉子旋轉,輸出力矩;為了克服傳統固-固接觸電刷摩擦力大,磨損消耗快,產生火花造成安全隱患等缺陷,研究人員還利用液態金屬優異的導電性和較低的粘度,設計了一種固-液接觸的液態金屬電刷,該電刷能避免導線纏繞,有效保證電路連通,同時,其轉動阻力比常規電刷小一到兩個數量級。研究人員還展示了利用該電機驅動小車和小船分別在陸地和水中運動的應用(圖4b , c)。該項工作有望彌補傳統驅動器件的缺陷,啟發液態金屬在柔性機器人、微機電系統、柔性電子等領域的應用和發展。相關成果以 “Liquid Metal Motor”為題發表在Cell子刊iScience上,并被Matter期刊作 Preview介紹。
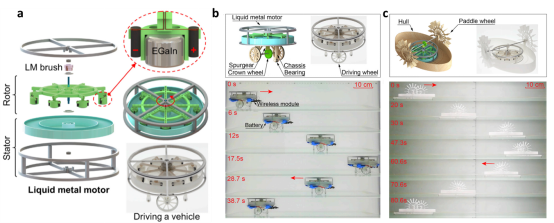
圖4 液態金屬電機(a)液態金屬電機結構圖;(b)和(c)液態金屬電機驅動的小車和小船;
